


QGroundControl (Daily Test Build)
QGroundControl (Daily Test Build)介绍
IMPORTANT: This version of QGroundControl is the daily testing version. It may not be as stable as the supported Stable version. It has all the latest features which are being added daily by the QGroundControl development team. This version should be sued with caution.
QGroundControl provides full flight control and configuration for ArduPilot or PX4 Pro powered vehicles. The goal for QGroundControl is improved ease of use for new users as well as high end feature support for experienced users.
QGroundControl features:
- Full configuration support for vehicles running PX4 Pro and ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub ) firmware
- Mission planning for autonomous flight
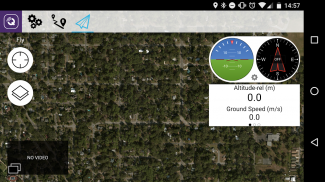
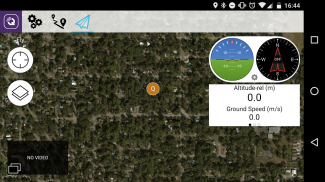
- Flight map display showing vehicle position, flight track, waypoints and vehicle instruments
- Video streaming with instrument display overlays
- Flight support for any MAVLink capable vehicle
QGroundControl is also available for Windows, MacOS, Linux and iOS.
Release Notes
QGroundControl Official Site
Documentation
Support
重要说明:此版本的QGroundControl是日常测试版本。它可能不如受支持的稳定版本稳定。它具有QGroundControl开发团队每天都会添加的所有最新功能。该版本应谨慎使用。
QGroundControl为ArduPilot或PX4 Pro动力车辆提供完整的飞行控制和配置。 QGroundControl的目标是提高新用户的易用性,以及为有经验的用户提供高端功能支持。
QGroundControl功能:
-对运行PX4 Pro和ArduPilot(ArduCopter,ArduPlane,ArduRover,ArduSub)固件的车辆的完整配置支持
-自主飞行的任务计划
-飞行地图显示,显示飞行器位置,飞行轨迹,航路点和飞行器仪表
-带仪表显示覆盖的视频流
-任何支持MAVLink的车辆的飞行支持
QGroundControl也可用于Windows,MacOS,Linux和iOS。
发行说明
QGroundControl官方网站
文档
支持
QGroundControl (Daily Test Build) - 版本4.1.0-8-g246d5742b
(18-01-2021)QGroundControl (Daily Test Build) - APK信息
APK版本: 4.1.0-8-g246d5742b程序包: org.mavlink.qgroundcontrolbetaQGroundControl (Daily Test Build)的最新版本
其他版本














同类应用


您可能还会喜欢……








